哈工大报








最新发布
- 08-21
- 08-21
- 08-20
- 08-19
- 08-19
- 08-19
- 08-19
- 08-17
哈工大刘英想教授团队成功研制具有可重构能力的新型厘米级压电机器人
-
分享
微信扫一扫:分享
哈工大全媒体(阚思邈 高宇/文 高宇/图)近日,我校机电工程学院刘英想教授团队在厘米级机器人研究方面取得新进展,成功研制出一种具有可重构能力的新型厘米级压电机器人。相关研究以《基于内置陶瓷驱动的厘米级可重构压电机器人》(Centimeter-scale Reconfiguration Piezo Robots with Built-in-Ceramic Actuation Unit)为题发表在中国工程院院刊《工程》(Engineering)上。这一研究成果为厘米级机器人实现小型化、大负载、快速运动和模块化可重构的兼备提供了一种有效的解决思路。
可重构机器人具有良好的环境适应性和功能拓展能力,在复杂环境的信息探索和任务执行等方面展现出较好的应用前景,是机器人领域的热门研究方向。其中,模块尺寸和可重构策略是影响机器人运动特性和功能实现的两个关键因素。采用传统电磁驱动方式的机器人容易实现快速运动,但受限于传动机构,单个重构模块的结构相对复杂,不利于进一步小型化。压电驱动具有响应快、结构简单、功率密度大、电磁兼容性好等优点,非常契合厘米级机器人的发展需求。然而,将压电驱动技术应用于可重构机器人领域仍然存在较大挑战。一方面,目前压电机器人模块单机的集成度较低,其驱动、控制、通信和供电单元通常是分离甚至部分缺失;另一方面,模块之间缺乏有效的可重构策略和构型特性预估方法,较难实现丰富且系列化的压电机器人构型群。因此,研制出集成控制、通信和供电单元的小型压电机器人模块单机,探究针对小型化模块间的可重构策略和构型特性预估方法,对厘米级可重构压电机器人的发展具有重要意义。
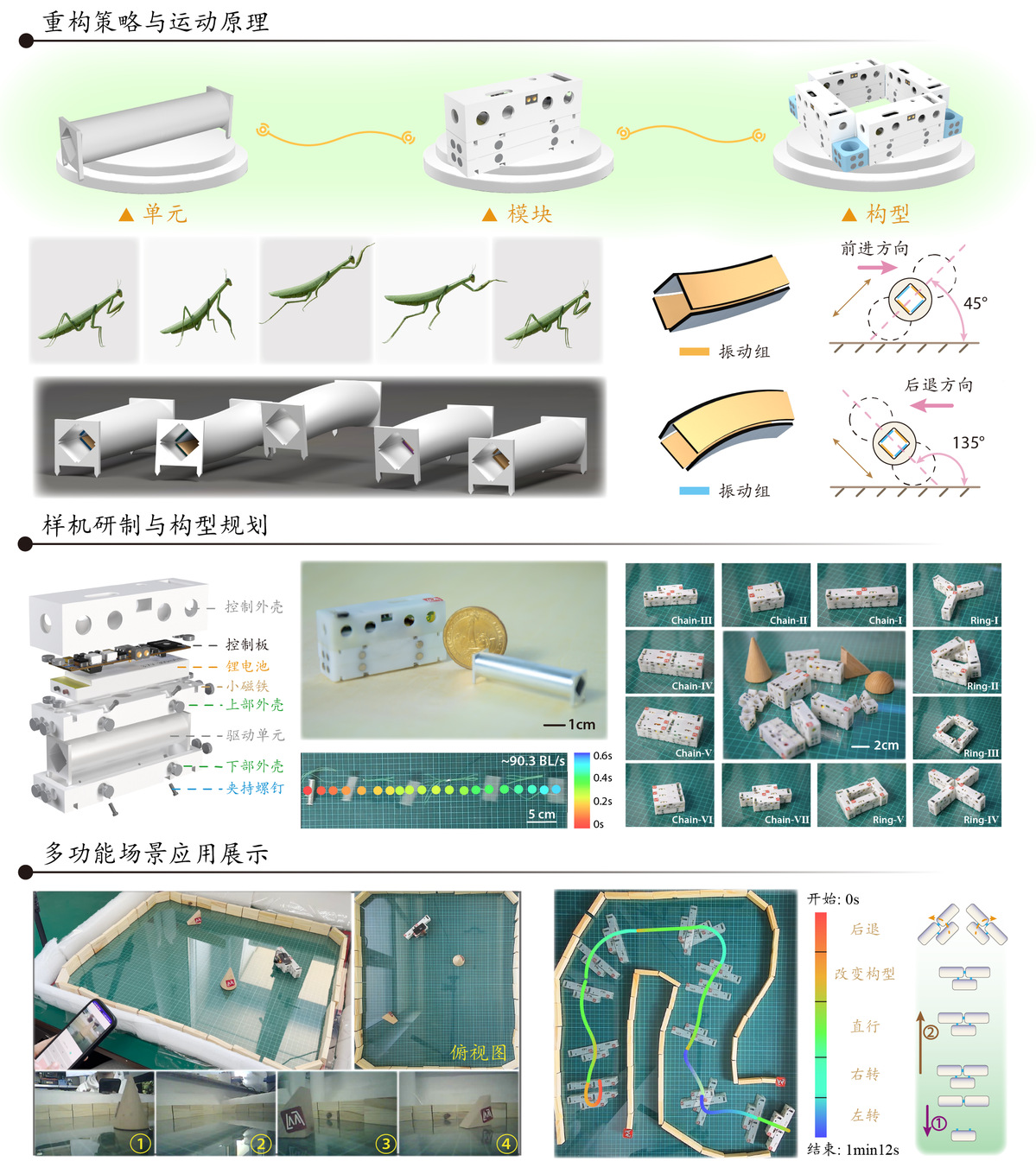
厘米级可重构压电机器人的重构策略、构型规划和展示试验
针对上述挑战,该团队从螳螂“冲击-跳跃”运动模式中受到启发,提出了一种基于内置压电陶瓷驱动的厘米级四足压电机器人,其体积44×10×12.5立方毫米(mm3),仅重6.5克(g)。通过分析陶瓷数量、安装角度和位置对压电弹性体振动模态的影响规律,确定了斜向45°正交分布的压电陶瓷布置方法,使机器人仅由一路激励信号即可生成双向斜线致动轨迹,进而实现前进和后退运动。机器人实现了高达90.3倍体长每秒(超过900毫米每秒)的快速运动,承载能力高达自重的31.6倍(超过200克)。在此基础上,通过集成控制、通信、供电单元与磁吸触点,在厘米级受限体积下实现了模块单机的高集成度封装(50×15×27立方毫米,21.22克)。单个模块具有16个周向布置的磁吸触点和无线束受控运动能力。团队通过包括“自连接”和“块连接”在内的多点位连接方法,实现了9个系列、超过25种不同的机器人构型。研究进一步提出了以模块数量和连接权重为核心的构型特性预估方法,实现了任意机器人构型的特性趋势预测,助推构型优选过程。试验结果表明:所研发的机器人通过组合重构改变构型拓扑,能够克服多种复杂地形并实现功能化拓展应用,在包括穿越宽槽、跨越窄缝、穿越迷宫、穿越具有高度差的地形、通过狭窄弯道以及无线图像采集等实验中,展现了良好的环境适应特性和模块化扩展能力,为复杂环境中的多样化任务执行奠定了良好基础。
哈工大为论文唯一完成单位与通讯单位。机电工程学院博士研究生高宇、副研究员李京和张仕静为论文共同第一作者,刘英想教授和邓杰教授为论文共同通讯作者,陈维山教授为论文共同作者。
该项研究工作得到了国家自然科学基金、黑龙江省博士后科学基金以及国家资助博士后研究人员计划项目资助。
论文链接:https://doi.org/10.1016/j.eng.2025.06.043